Did you know that you can navigate the posts by swiping left and right?
모터 설명
30 Jan 2018
. category:
tech
.
Comments
#atmega 128
#mechatronics
#science knowledge
avr과 연동해 쓰는 모터는 여러가지가 있는데 dc,스테핑,서보모터등 이 있다. 하나하나 설명하면 먼저 서보모터를 소개하자면 이 서보모터 자체 내부에 제어기가 들어가 있고 pwm신호를 받아 조절해서 인터럽트문을 통해 조절해줄 수 있다. 모터마다 각 각도와 대응되는 신호가 다르기 때문에 만약 서보모터를 구입해 사용한다면 몇ms가 몇도인지 확인한 후에 사용해야 될것같다. 선은 가운데 VCC(빨간색)을 기준으로 양쪽으로 PWM선, GND선이 있다. 움직이는 물체나 혹은 일정한 각도를 필요하는 곳에 사용하면 좋을 것 같다.
다음으로는 스테핑 모터에대해 말하려 하는데 저속에 정밀한 특징을 가진 이 모터는 모터 드라이브를 통해 펄스와 상의 변화로 모터회전을 해주는데 구동방식에는 유니폴라와 바이폴라가 있다. 바이폴라는 힘이 처음에 세지만 속도가 높아질수록 토크가 빨리 떨어지는 경향이 있고 유니폴라는 바이폴라에 비해 힘은 초기에 약하지만 속도가 높아지면 바이폴라에 비해서는 토크가 덜 떨어지는 경향을 가진다.
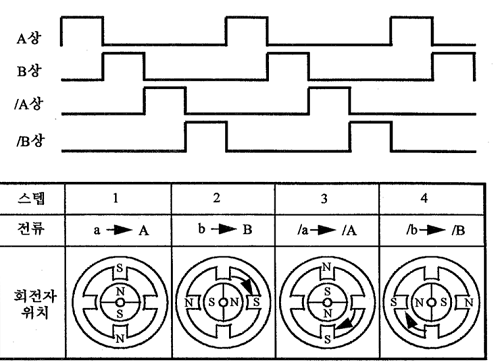
유니폴라 구동방식을 기준으로 설명하자면 1상여자방식은 코일의 1개의 상에 전류를 순차적으로 흐르게 하는 방식인데 진동이 크고 고속으로 갈수록 탈조가 쉬워진다.
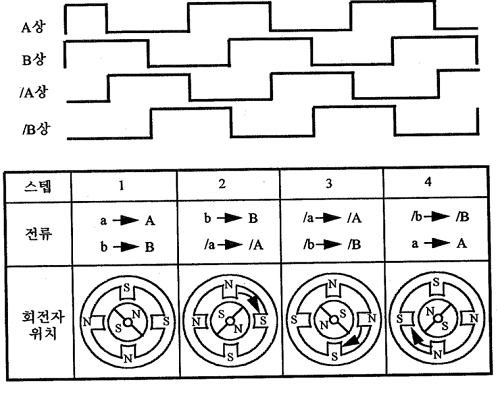
다음으로 2상 여자방식인데 2개의 상에 동시에 전류를 흐르게하여 1상에 비해 2배의 전류가 흐른다. 그래서 회전력이 커지고, 감쇄진동이 적어진다.
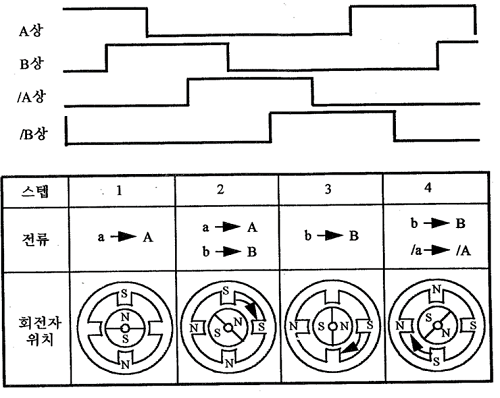
마지막은 1-2상여자방식인데 1상과 2상이 서로 방식을 교대하면서 나타난다. 그래서 1상에 비해 전류는 1.5배이지만 토크는 2배를 가지고 회전각은 45도정도 즉 1상,2상에 1/2이 된다.
사진출처는 http://blog.naver.com/PostView.nhn?blogId=motor2662&logNo=70190061974 에서 받아왔습니다.

github를 이용해 만들어본 블로그입니다.